반응형
https://durian9s-coding-tree.tistory.com/162
원통좌표형 매니퓰레이터 URDF 만들기
cd ~/catkin_ws/src/testbot_description/urdf vim testbot_homework.urdf urdf파일을 작성하고 아래의 코드를 실행시킨다. $ roslaunch testbot_description testbot_homework.launch roslaunch를 실행시킨 상..
durian9s-coding-tree.tistory.com
어제 원통 좌표형 매니퓰레이터를 만들었었고, 오늘은 로봇 청소기 모양의 매니퓰레이터를 만들었다.
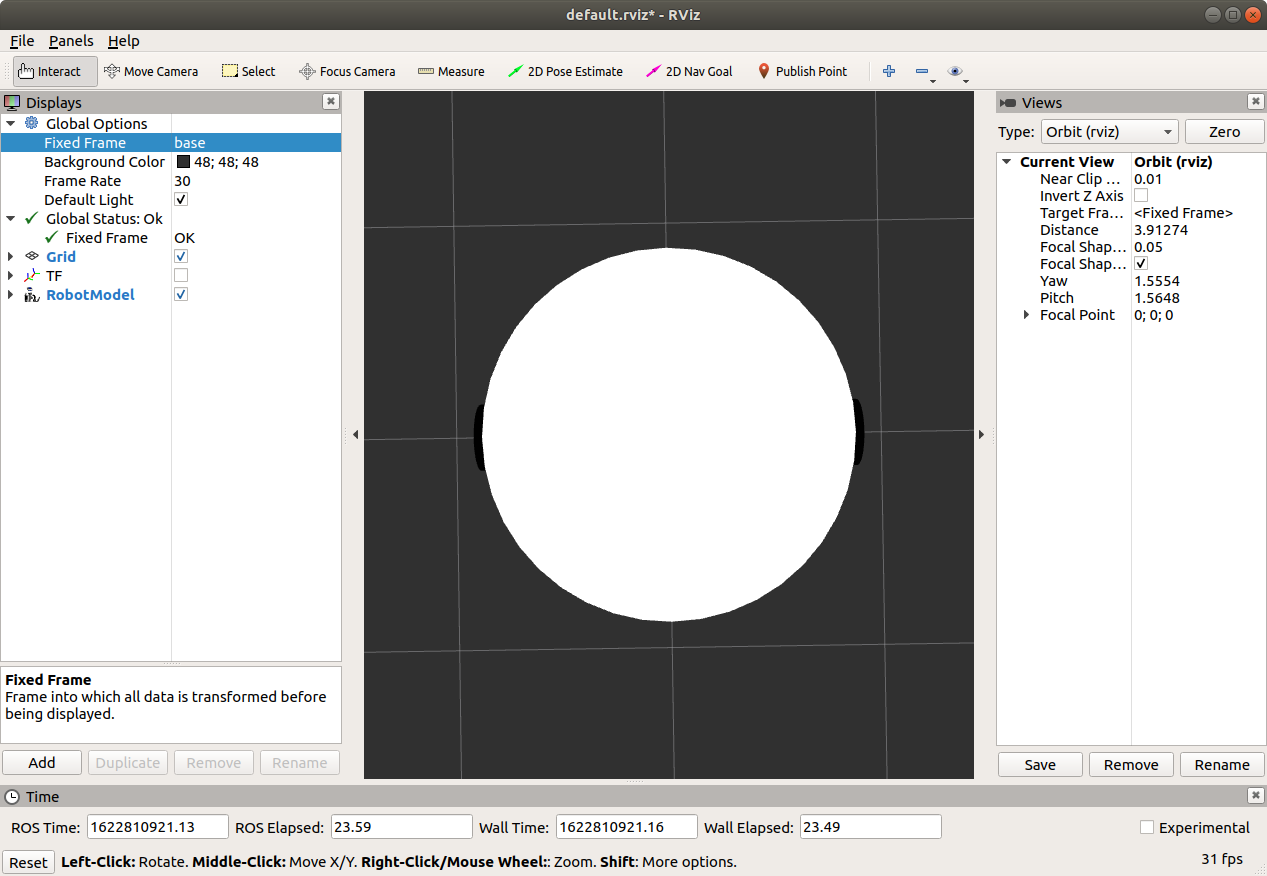
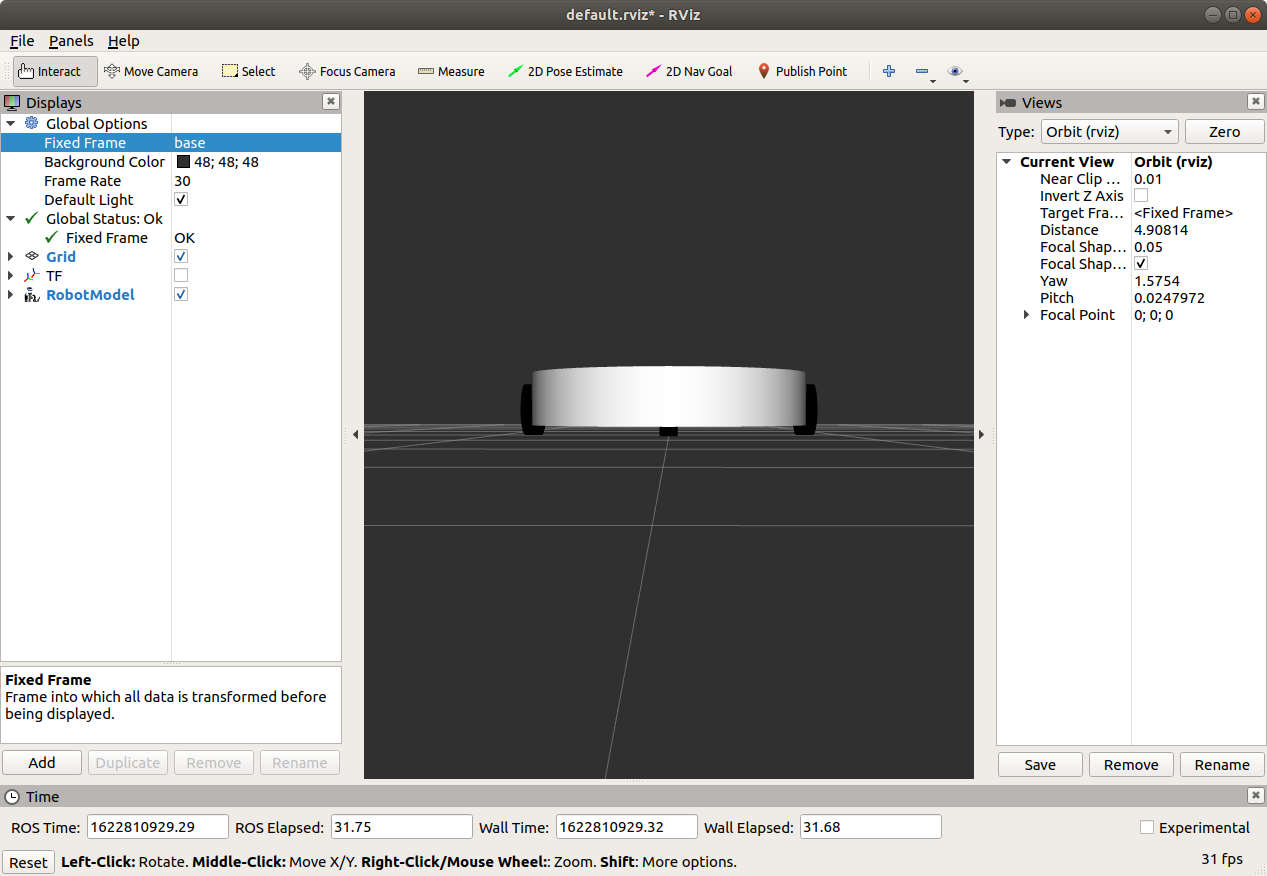
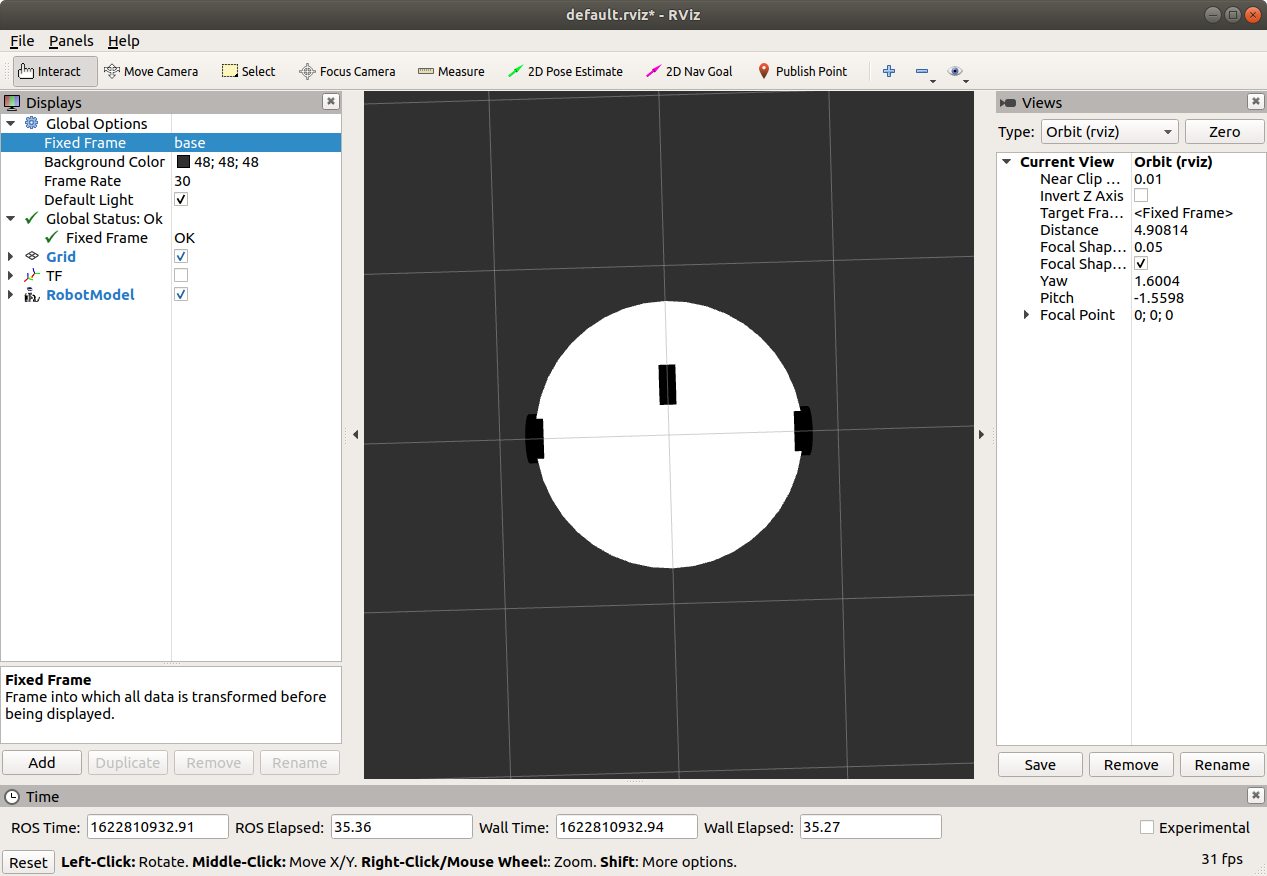
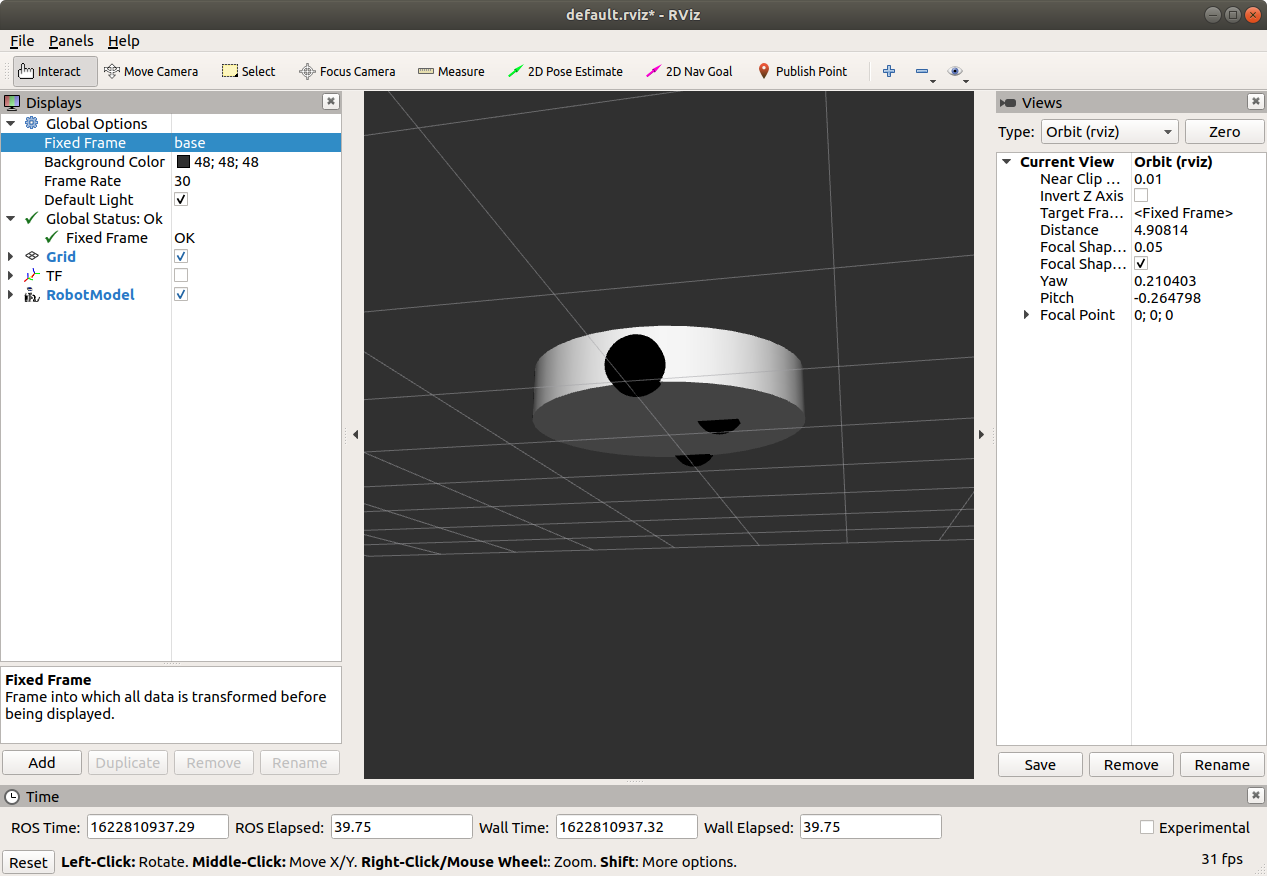
모양은 비교적 쉽에 만들었으나 조인트를 조정하여 바퀴를 만져봤을 때 생각지도 못한 부분의 디버깅으로 인해 시간이 다소 소요되었다.
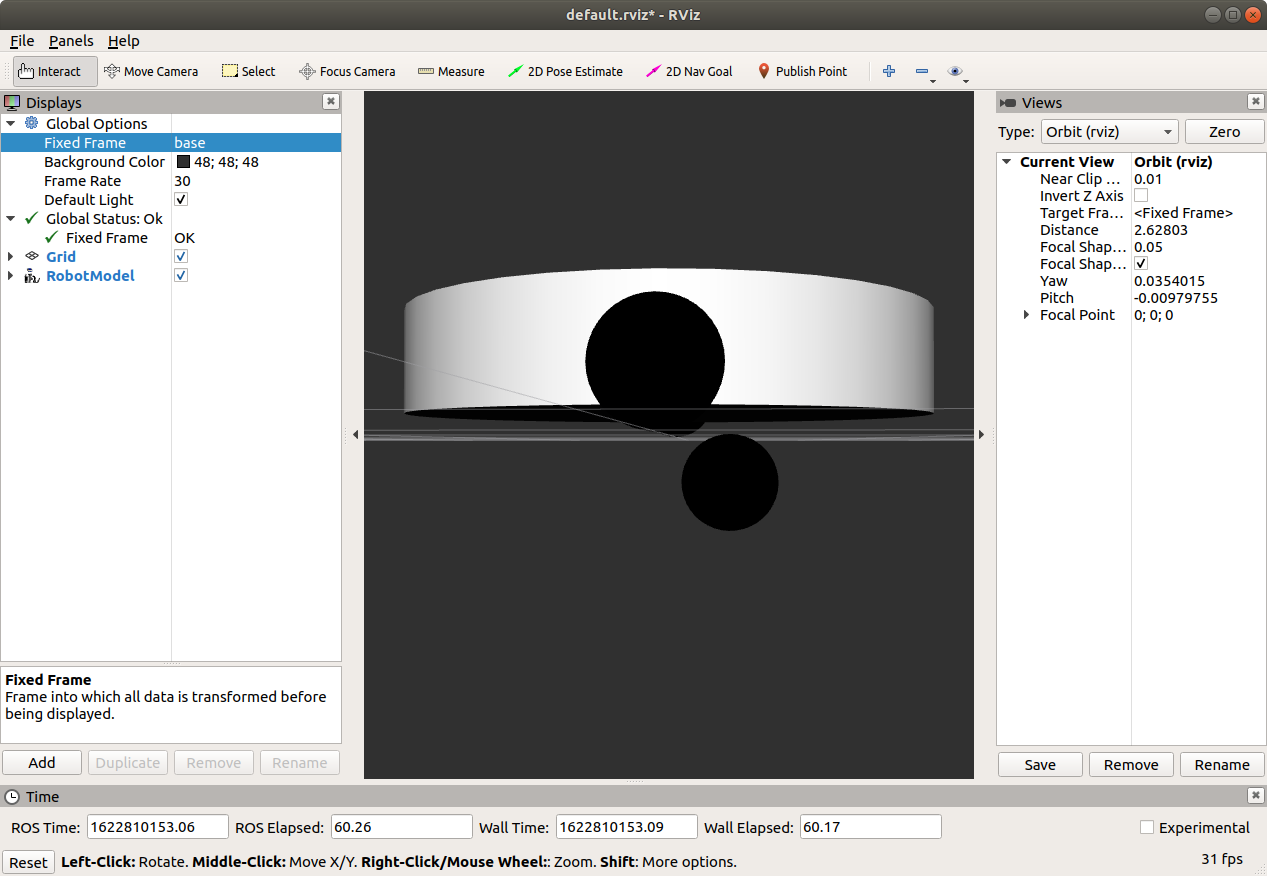
문제는 축의 설정.
조인트와 중심의 개념을 더 숙지할 필요가 있어보인다.
아래는 코드
<?xml version="1.0" ?>
<robot name="testbot">
<material name="black">
<color rgba="0.0 0.0 0.0 1.0"/>
</material>
<material name="orange">
<color rgba="1.0 0.4 0.0 1.0"/>
</material>
<link name="base">
<visual>
<geometry>
<cylinder length="0.3" radius="0.8"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0.21"/>
<material name="white">
<color rgba="1.0 1.0 1.0 1.0"/>
</material>
</visual>
<collision>
<geometry>
<cylinder length="0.3" radius="0.8"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0.21"/>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/> </inertial>
</link>
<joint name="joint1" type="continuous">
<parent link="base"/>
<child link="link1"/>
<origin xyz="0.4 0 0.15" rpy="0 0 0"/>
<axis xyz="1 0 0"/>
<limit effort="30" lower="-2.617" upper="2.617" velocity="1.571"/>
</joint>
<link name="link1">
<collision>
<origin xyz="0.4 0 0" rpy="0 1.57 0"/>
<geometry>
<cylinder length="0.1" radius="0.15"/>
</geometry>
</collision>
<visual>
<origin xyz="0.4 0 0" rpy="0 1.57 0"/>
<geometry>
<cylinder length="0.1" radius="0.15"/>
</geometry>
<material name="black"/>
</visual>
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<joint name="joint2" type="continuous">
<parent link="base"/>
<child link="link2"/>
<origin xyz="-0.4 0 0.15" rpy="0 0 0"/>
<axis xyz="1 0 0"/>
<limit effort="30" lower="-2.617" upper="2.617" velocity="1.571"/>
</joint>
<link name="link2">
<collision>
<origin xyz="-0.4 0 0" rpy="0 1.57 0"/>
<geometry>
<cylinder length="0.1" radius="0.15"/>
</geometry>
</collision>
<visual>
<origin xyz="-0.4 0 0" rpy="0 1.57 0"/>
<geometry>
<cylinder length="0.1" radius="0.15"/>
</geometry>
<material name="black"/>
</visual>
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<joint name="joint3" type="continuous">
<parent link="base"/>
<child link="link3"/>
<origin xyz="0 0.3 0.15" rpy="0 0 0"/>
<axis xyz="1 0 0"/>
<limit effort="30" lower="-2.617" upper="2.617" velocity="1.571"/>
</joint>
<link name="link3">
<collision>
<origin xyz="0 0 0" rpy="0 1.57 0"/>
<geometry>
<cylinder length="0.1" radius="0.15"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="0 1.57 0"/>
<geometry>
<cylinder length="0.1" radius="0.15"/>
</geometry>
<material name="black"/>
</visual>
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
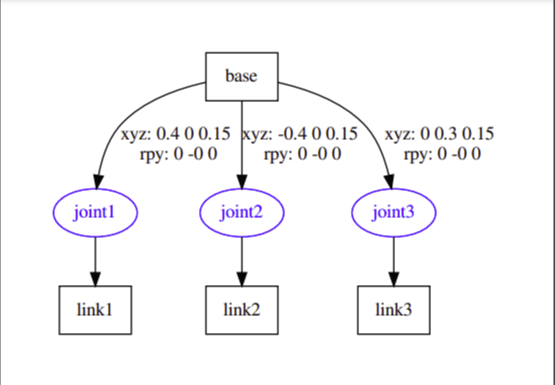
</robot>$ cd ~/catkin_ws/src/testbot_description/urdf
$ urdf_to_graphiz testbot_homework2.urdf
반응형
'ROS(drone포함)' 카테고리의 다른 글
| ROS 기본 개념 (topic, service, action, parameter) (0) | 2021.08.18 |
|---|---|
| ROS topic 통신 (0) | 2021.06.15 |
| 원통좌표형 매니퓰레이터 URDF 만들기 (0) | 2021.06.03 |
| Manipulator 모델링 (0) | 2021.06.03 |
| Manipulator (0) | 2021.06.03 |