View Protect사 Z12TL 모델을 통해 드론에 사용하는 카메라 제원에 대해 알아보자.

제원

Working voltage = 동작전압. 실제로 사용되는 전압을 말함.
Input voltage = 입력 전압
Output voltage = 출력 전압
Dynamic current = 카메라모듈이 작동 중일 때 소모되는 전류
Idle current = 카메라 모듈이 idle 상태일 때 소모되는 전류
Power consumption = 소비전력. 필요한 단위 시간당 전기 에너지의 양
Control method = PWM, TTL, S.BUS
PWM - Pulse Width Modulation의 약자로 펄스폭 변조를 말하는 것이다. 쉽게 말해, 디지털 신호를 아날로그 신호처럼 흉내 내는 것이라고 보면 된다. 아날로그 신호는 sin신호처럼 곡선으로 연속된 형태의 신호이고, 디지털 신호는 0(low)과 1(high)만 가지고 있다.

TTL - Transistor Transistor Logic의 약자로 트랜지스터와 트랜지스터를 조합한 논리회로, DTL(Diode-Transistor Logic)의 다이오드 대신에 트랜지스터를 사용, 컴퓨터 제어 가장 많이 사용된다. 컴퓨터에 사용되고 있는 기본적인 회로이자 트랜지스터 회로이다. DTL의 다이오드 대신에 멀티 이미지 트랜지스터를 사용한 것으로 , IC구성이 간단하고 저전력 고속 동작의 장점이 있다. but 18bit 이상의 고해상도 RGB/YPbPr 인터페이스로 시장의 흐름이 이동하고 있기에 TTL기반의 인터페이스는 고속 비디오 전송에 적합하지 않다는 의견이 있다.
S.BUS - Sirial BUS / RC라디오 수신기 프로토콜 중의 하나로 라디오 링크나 후타바, FrSky에서 사용하는 시리얼 통신의 프로토콜임. 하나의 신호 케이블만을 사용하여 최대 18개의 채널을 지원함.
SBOS는 역전된 UART 통신 신호이기에 UART 통신이 가능한 FC라도 신호를 수신받기 위해서는 내장된 전용신호 변환기를 통해 신호를 반전시켜야 함.



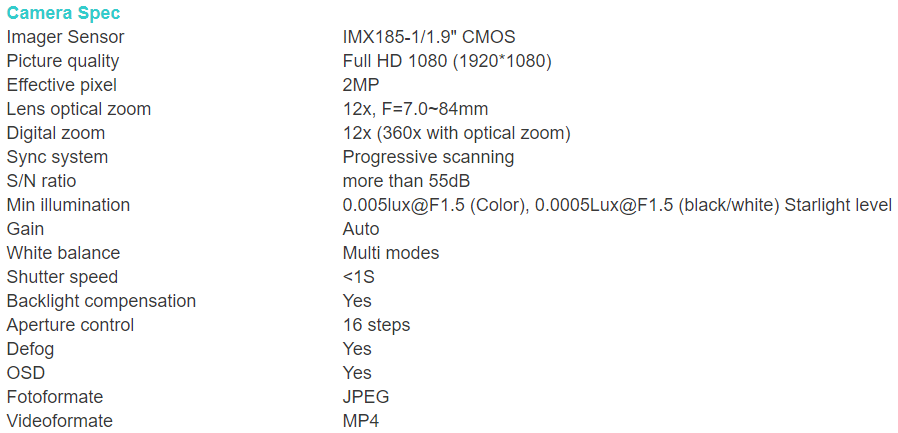
Image Sensor - 사용하는 이미지 센서
Picture quality - 이미지 품질 / 해상도
Effective Pixel - 유효픽셀. 실제로 이미지 데이터를 캡처하는 픽셀
Lens optical zoom - 광학줌. 광학렌즈를 움직여 초점을 조절하고 이미지가 물리적으로 확대됨. 화질의 손상 없이 12 배율 줌 가능. (F는 조리개 값)
Digital zoom - 디지털 줌. 이미지를 전자적으로 확대하는 방법. 사진을 잘라 해상도를 줄이고 사진의 크기를 키움.
Sync system - synchronous 동기화 시스템.
S/N ratio - 신호대비 잡음의 비율. 값이 높을수록 노이즈가 적다.
Min illuminator - 최저 피사체 조도. 카메라로 촬영 시 필요로 하는 빛의 최저량.
Gain - 카메라 센서의 신호 증폭을 제어하는 카메라의 설정. 배경 소음을 초함해 모든 신호를 증폭시킴.
White balance - 외부의 광원에 의해 원래 색과 달라졌을 때 보정할 수 있는 기능
shutter speed - 셔터스피드
blacklight compensation - 역광보정 기능
Aperture control - 조리개 조절 단계
Defog - 습기방지 기능
OSD - On Screen Display의 약자로 장치에 표시된 메뉴로 디스플레이를 조정.
Fotoformate - 사진 파일의 형식(?)
Videoformate - 비디오 파일 형식
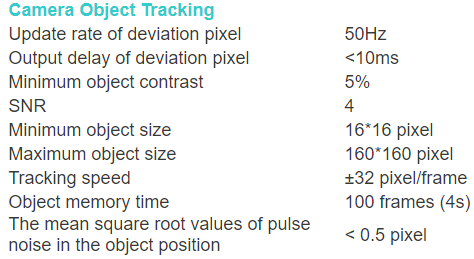
카메라의 개체 추적
Update rate of deviation pixel - 편차 픽셀의 업데이트 속도
Output delay of deviation - 출력 지연
Minimum object contrast - 최소 개체 대비
SNR - 신호 대비 잡음비 - 4
Minimum object size - 최소 개체의 크기
Maximum object size - 최대 개체의 크기
Tracking speed - 추적 속도
Object memory time - 객체 메모리 시간
The mean square root values of pulse noise in the object position - 물체 위치에서 펄스 노이즈의 평균 루트 값

Effective range - 유효 범위
Light wave length - 광 파장
Illumination angle - 조명의 각도(파워줌 동기화 시)
Zoom time - 줌 시간
Power consumption of laser chipset - 전력소비
Illumination angle - 조명의 각도
Working voltage - 동작 전압
Power consumption in total - 총 소비전력
Control system - 제어시스템
Communication system - 커뮤니케이션 시스템
Communication protocol - 통신 프로토콜
프로토콜
시리얼 통신을 사용하기 위해 보내는 쪽(Tx)과 받는 쪽(Rx)에서 약속을 정한 것
*UART 통신
UART(Universal asynchronous receiver/transmitter) - 범용 비동기화 송수신기.
UART 통신은 전이중 방식(Full Duplex) 통신으로 송신과 수신을 동시에 진행할 수 있고, usb 시리얼 변환 장치를 통해 컴퓨터와 MCU보드 간 통신이 가능하다.
비동기식 통신이기 때문에 데이터를 어떻게 해석할지가 중요함. 데이터의 해석을 위해 보 레이트, 데이터의 길이, 패리티 비트, 정지 비트 등의 정보가 필요하다.
* 보 레이트(Baud Rate) - 초당 얼마나 많은 심벌(의미 있는 데이터의 묶음)을 전송할 지에 대한 정보
* 데이터의 길이 - 송수신 데이터의 길이(8bit or 7bit)
* 패리티 비트 - 패리티 비트 사용 X, Even(짝수) 패리티 사용, Odd(홀수) 패리티 사용
* 정지 비트 - 정지 비트(1~2개)
드론에 장착은 어떻게?

Pixhawk4(FC)와 라즈베리파이 또는 Jetson Xavier NX(CC)를 사용하여 영상 데이터는 젯슨 NX와 LTE 통신망을 통해, 짐벌 제어는 FC와 Datalink, S.BUS를 사용하여 미션 플래너로 제어할 것이다.
영상의 경우 deepstream으로 동영상을 처리(TFOD 포함)하고, LTE 통신을 사용하여 미션 플래너로 실시간 스트리밍 예정
Object Detection


영상 인식을 통해(YOLO/ SSD/ Fster-RCNN등) 객체를 인식하는 기법.
드론에 장착된 카메라에서 촬영한 영상을 Companion Computer에게 전달을 하고, 이를 Object detection을 수행하여 LTE 통신망을 통해 GCS로 전달하는 방식을 사용할 것,
아래는 라즈베리 파이와(CC) px4(FC)의 연동을 위한 동영상.
https://www.youtube.com/watch?v=kB9YyG2V-nA&t=1878s
이건 4g 적용하는 방법
https://www.youtube.com/watch?v=IokyotAGbJI&t=1401s
lte연결 youtube
https://www.youtube.com/watch?v=mIwHNGQDaEU
camera following
https://www.youtube.com/watch?v=uzrugbQCO64&t=4s
Tower app follow me 기능
https://www.youtube.com/watch?v=LM1klzuC6Xw
Drone AI Forest Tracking
https://www.youtube.com/watch?v=H7Ym3DMSGms&t=9s
IR 카메라와 AI를 이용한 열화상 수색
https://www.youtube.com/watch?v=9HLdiJAZNTM
http://www.viewprotech.com/index.php?ac=article&at=read&did=213
Z12TL-IR Laser Illumination Series-Shenzhen Viewpro Technology Co., Ltd.
Professioanl 3-axis High-precise FOC Program Stabilizing the Z12TL is a highly optimized 3-axis camera gimbal with pinpoint-precise motor rotation with a c
www.viewprotech.com
'ROS(drone포함)' 카테고리의 다른 글
| TurtleBot3 사용하기 (0) | 2021.10.12 |
|---|---|
| ROS service 프로그래밍 (0) | 2021.10.12 |
| dronekit-python 사용법 (0) | 2021.08.27 |
| CMake 불가 디버깅 과정 (0) | 2021.08.25 |
| dronekit 설치하기 (0) | 2021.08.19 |