아으.. 어렵다.
블로그를 보고 터틀봇을 gazebo환경에서 구현해보았다.
ROBOTIS e-Manual
emanual.robotis.com
cd ~/catkin_ws/src/
git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
cd ~/catkin_ws && catkin_make터틀봇과 관련된 깃허브를 클론한다.
export TURTLEBOT3_MODEL=burger
매번 입력하기 귀찮으니 ~/.bashrc에 입력해놓았다.
각각 다른 쉘에 아래를 실행
roslaunch turtlebot3_fake turtlebot3_fake.launch
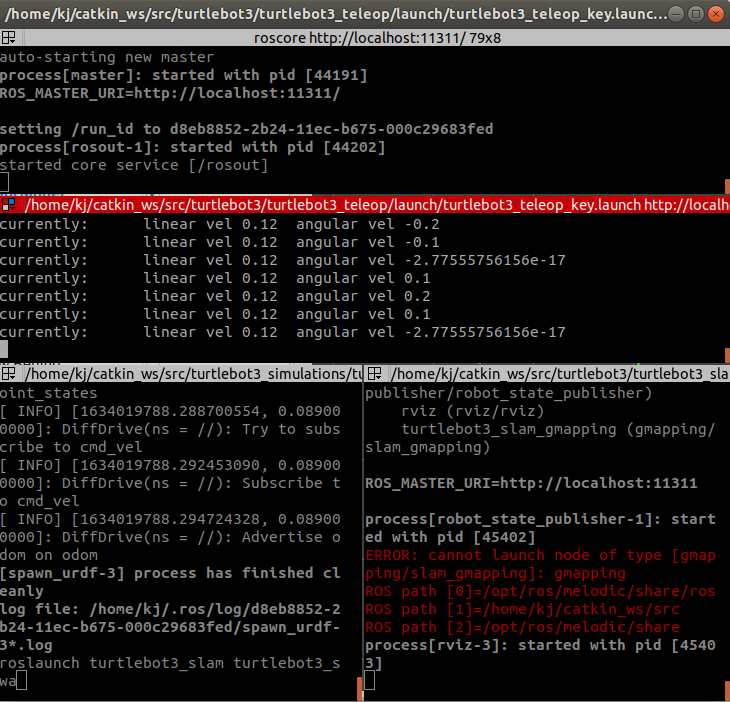
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch (터틀봇 조정)
w a d x 로 앞뒤좌우를 조절할 수 있고, s는 정지를 하게한다.
한번에 앞으로 가는게 아닌 가속도가 붙어서 가는 느낌.
드론으로따지면 atti모드와 비슷했다.
SLAM
가제보 실행 - roslaunch turtlebot3_gazebo turtlebot3_world.launch
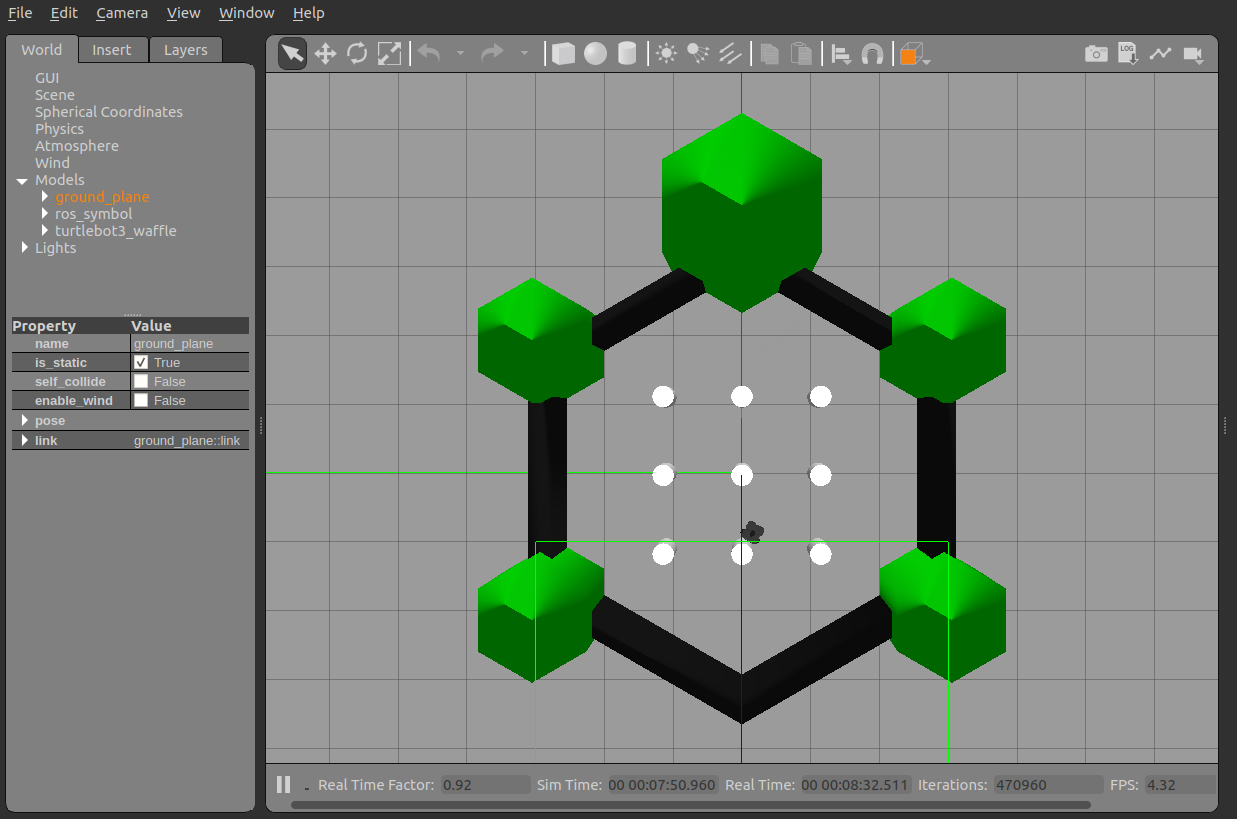
roslaunch turtlebot3_slam turtlebot3_slam.launch
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
아래에 활성화 되어있는 터미널.
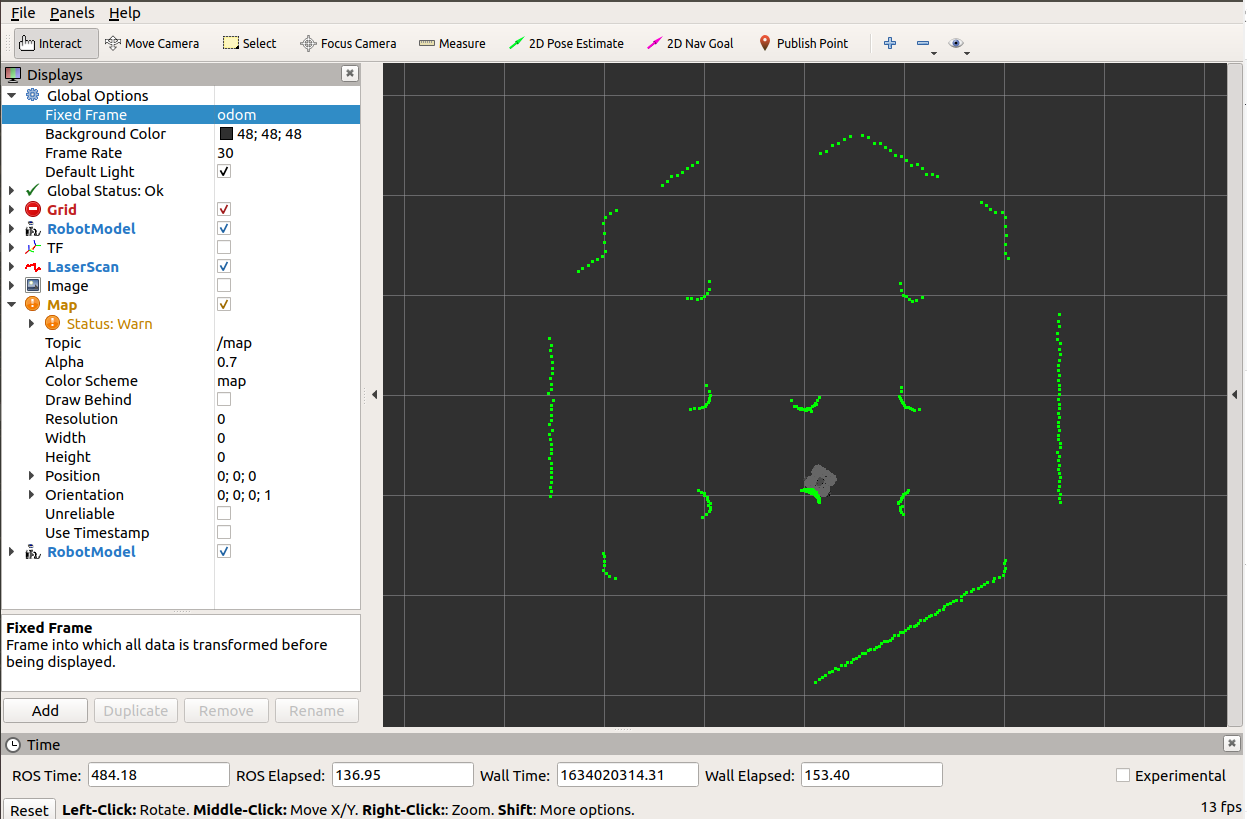
처음에 rviz를 그냥 사용하고 움직이려해도 잘 되지 않는다.
가상 로봇을 실행하기위해 파일을 불러오는 과정
-> 터틀봇3 패키지에서 터틀봇3의 3차원 모델을 불러옵니다.
-> 원래는 RViz를 따로 열어
-> 왼쪽 디스플레이 창에서 [Global Options]->[fixed frame]을 '/odom'으로 바꾸고
-> 디스플레이 창의 왼쪽 아래에 있는 ADD버튼을 눌러
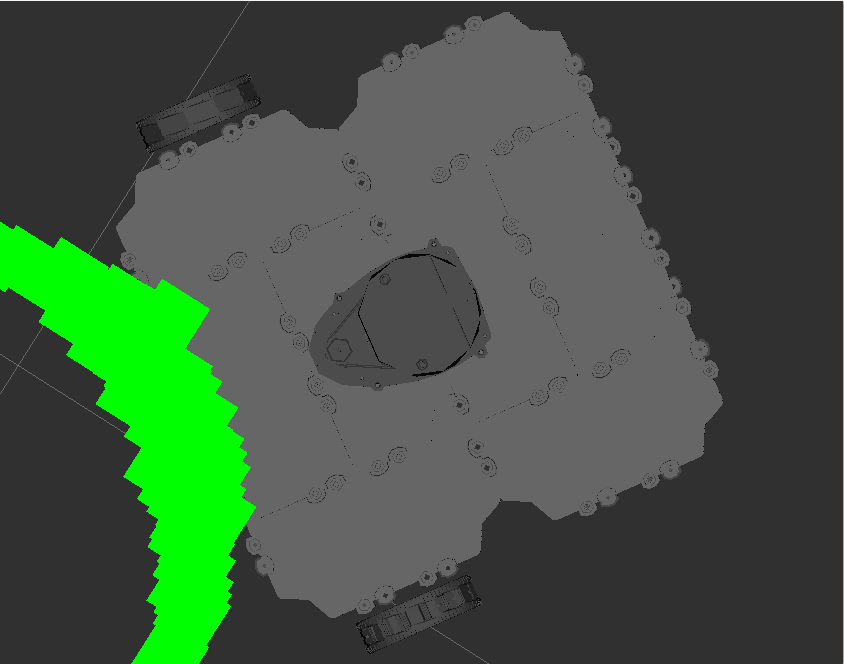
-> 디스플레이 중 'RobotModel'을 클릭해 추가해야함적용해주면 회색의 로봇이 나오고 그 이후부터 움직일 수 있다.
참고 - https://roomedia.tistory.com/entry/11%EC%9D%BC%EC%B0%A8-Turtlebot3-%EC%8B%9C%EB%AE%AC%EB%A0%88%EC%9D%B4%EC%85%98?category=877499
'ROS(drone포함)' 카테고리의 다른 글
| ROS LineFollow 따라하기.[급종료] (0) | 2021.11.01 |
|---|---|
| turtlebot3 시뮬레이션 (0) | 2021.10.13 |
| ROS service 프로그래밍 (0) | 2021.10.12 |
| View Protect사 Z12TL 모델로 알아보는 드론 짐벌 카메라 (0) | 2021.09.08 |
| dronekit-python 사용법 (0) | 2021.08.27 |